- Company
-
Product
- AC 전원공급기 (KC인증)
- 배터리 충방전기 (KC인증)
- DC 전원공급기 (KC인증)
- 전자로드
- 데이터수집장치(DAQ)
- Test & Measurements
- 양방향 DC 전원공급기
- 양방향 AC 전원공급기
- 안전규격시험기
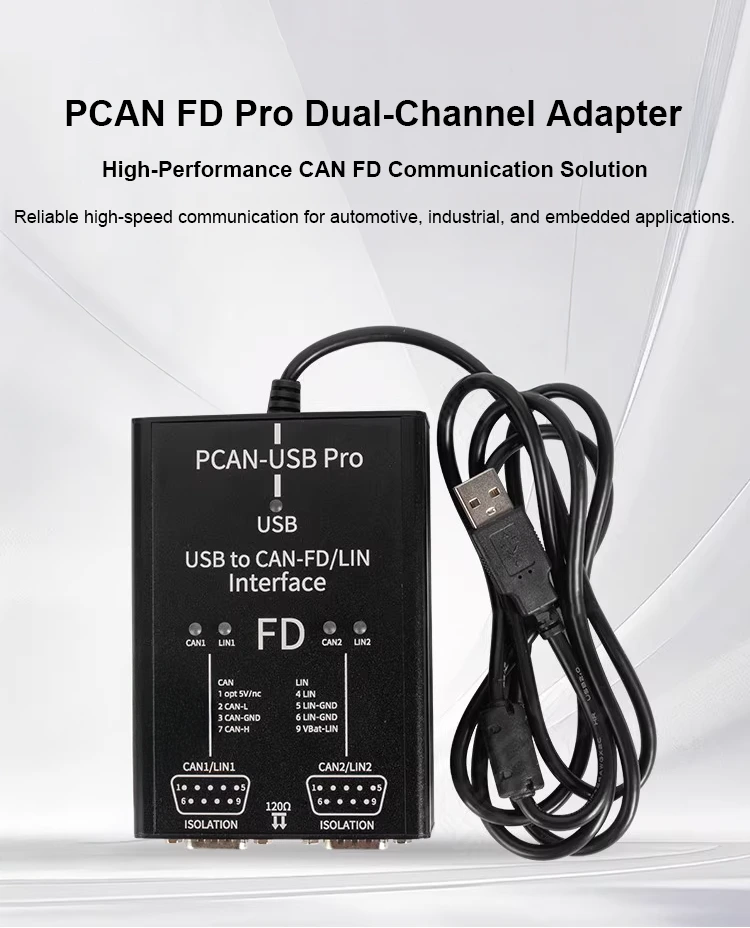
- 프로토콜 분석기
- 방사선 가시화 장비
- RF/마이크로파
- 계측기 브랜드 소개
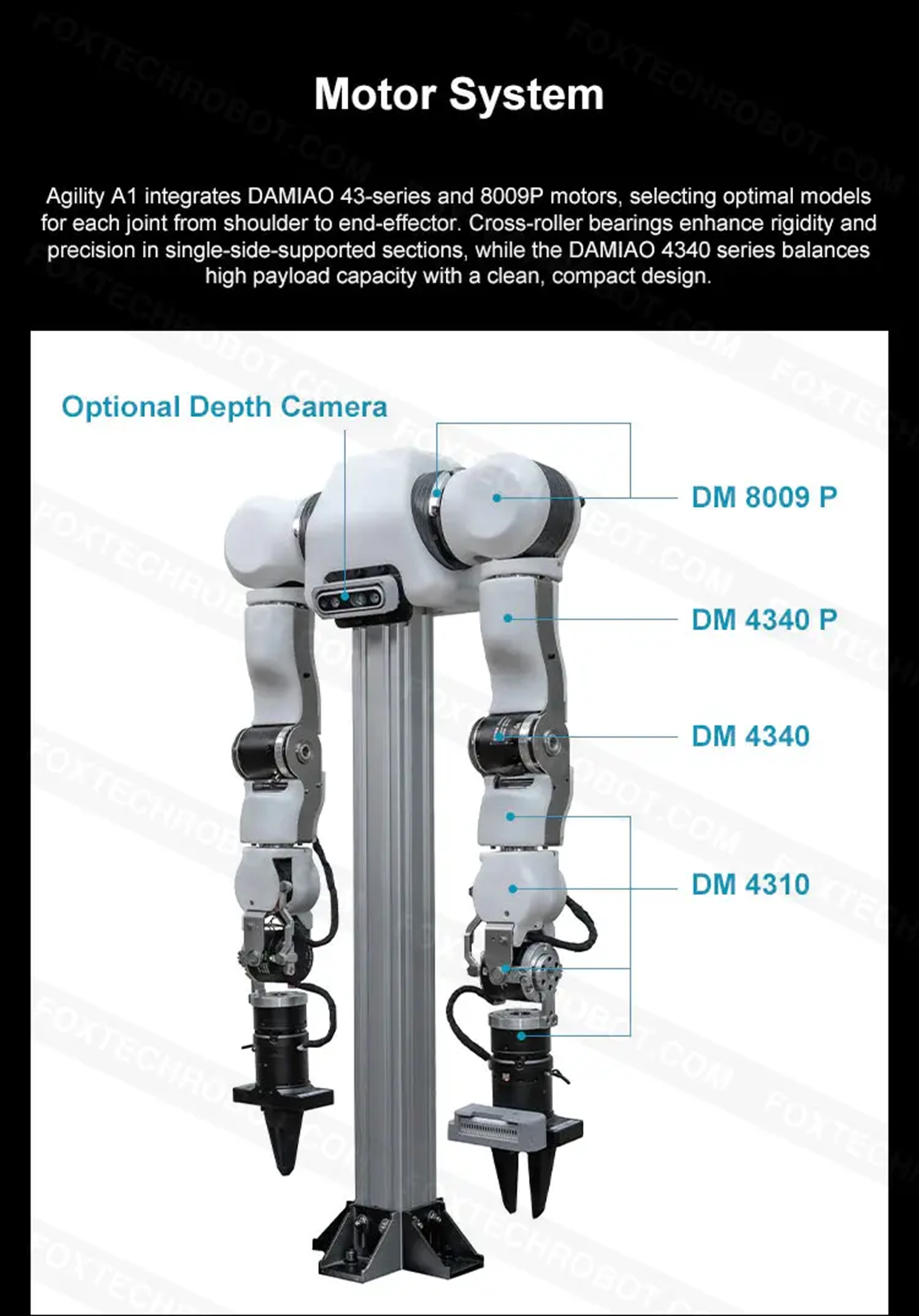
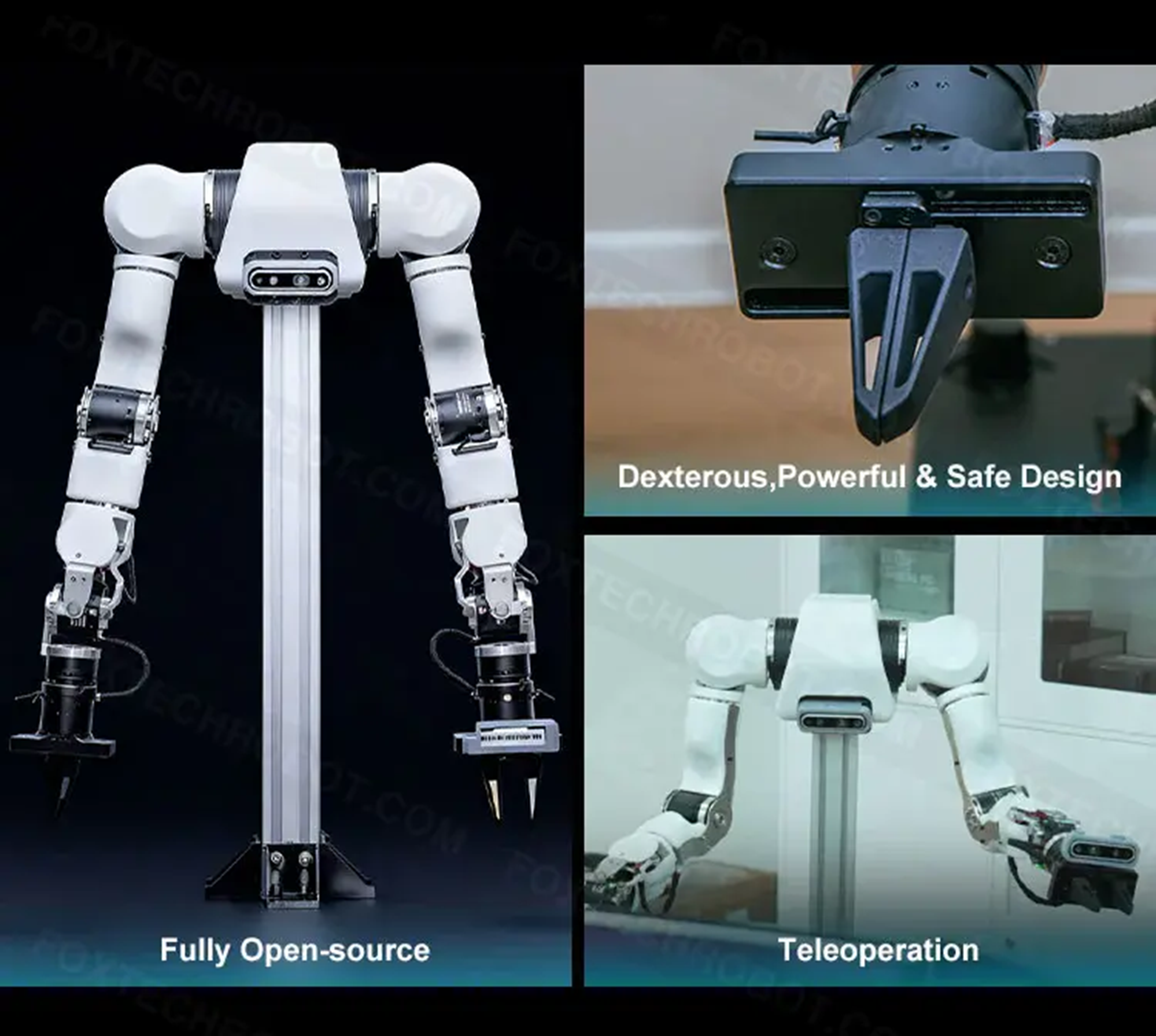
- 드론 및 로봇 관련
Product
(주)위슨테크놀로지 제품을 소개합니다.

- BRAND
-
Solution
- 초전도체용 고전류 전원 공급 장치
- 차세대 전력 반도체(SiC 및 GaN) 이중 펄스 테스트(DPT)용 DC 전원 공급기
- ESS.PCS 성능분석 및 인증(평가) 시스템
- 전원공급(Power Supply) 시스템
- 배터리(Battery) 시험 시스템
- 맞춤형 산업용 전력·전자 시험 의뢰 서비스
- 버스바(부스바) 시험 시스템
- 모의전원환경 시험 시스템
- 2차전지 시험 시스템
- 대전류 시험 시스템
- 계통연계형 인버터 성능평가 시험 시스템
- 직류배전용 전력변환장치 성능평가 시험 시스템
- 연료전지계통연계인버터 성능평가시험 시스템
- ESS PCS 검사 자동화 시험 시스템
- 전기자동차 충전분석 및 파워모듈 시험 시스템
- 방사능 가시화 장비 (Gamma Imager)
- WISON 시스템 솔루션
- 전력 전자 소프트웨어 및 하드웨어 제작
- 위슨테크놀로지 프로젝트 실적
Solution
제품 관련 솔루션 내용을 보실 수 있습니다.

- R & D
- 견적문의